|
|
|
センサを使った走行センサを使った走行です.前壁のみ検知し,壁が見つかるまで加速前進. 壁が見つかったら減速して標準の距離まで進み, 壁との角度を補正した後,Uターン, これを繰り返しています. ほおっておけば,誤差が重なって横壁にぶつかるまで かなり長い間往復してくれます. 携帯動画はこちら. MPEG動画はこちら. ---------------------------------- ハーフサイズマウスのプログラムの続きです. 左右壁を用いた位置補正ができるようになりました. ですので,往復走行も,もっと賢くなりました. 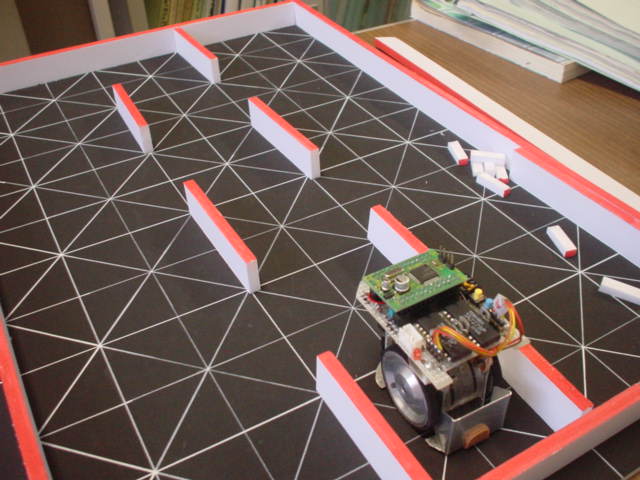  左右のセンサを使った距離補正による往復走行の動画 壁が途切れている時でも対応できます!の動画 周回走行の動画 壁が途切れているときの周回走行の動画 ---------------------------------- ジャンル別一覧
人気のクチコミテーマ
|



